What Is NVIDIA NemoClaw? OpenClaw, Hermes, and Secure Agent Runtimes
A practical explainer on NVIDIA NemoClaw: the open blueprint stack for OpenClaw and Hermes agents, OpenShell sandboxing, local inference, skills, routing, and enterprise control.
NVIDIA NemoClaw is not another large language model. It is an open reference stack for building and running agentic systems with stronger control over tools, models, state, and execution boundaries.
The easiest way to place it: Nemotron is the model family; OpenClaw and Hermes are orchestration paths; OpenShell is the controlled execution surface; NemoClaw is the blueprint that ties those pieces together into a deployable agent stack.
That framing comes directly from NVIDIA’s own material. The NemoClaw documentation describes NemoClaw as an open-source reference stack for secure, always-on agentic AI. NVIDIA’s NemoClaw product page positions it around open blueprints, runtime controls, model routing, skill execution, state, and observability. NVIDIA also publishes separate Build entries for NemoClaw for OpenClaw and NemoClaw for Hermes, which makes the intended architecture clear: NemoClaw is the agent-control stack around multiple orchestration choices.
For enterprise teams, the important question is not “Is NemoClaw better than every agent framework?” The better question is: “Do we need an open blueprint for controlled agent execution on NVIDIA-aligned infrastructure?”
This post explains what NemoClaw is, how it relates to OpenClaw, Hermes, and Nemotron, what workloads it targets, and where a governed AI platform or LLM gateway still fits around it.
What NemoClaw Solves
Agent systems fail in production for reasons that demos usually hide.
The model may be good enough, but the surrounding runtime is not. Agents need to read state, choose tools, call shells, run code, pass files between steps, recover from failures, and stay inside policy boundaries. Once the agent is always-on, every one of those surfaces becomes operational infrastructure.
NemoClaw addresses that runtime problem.
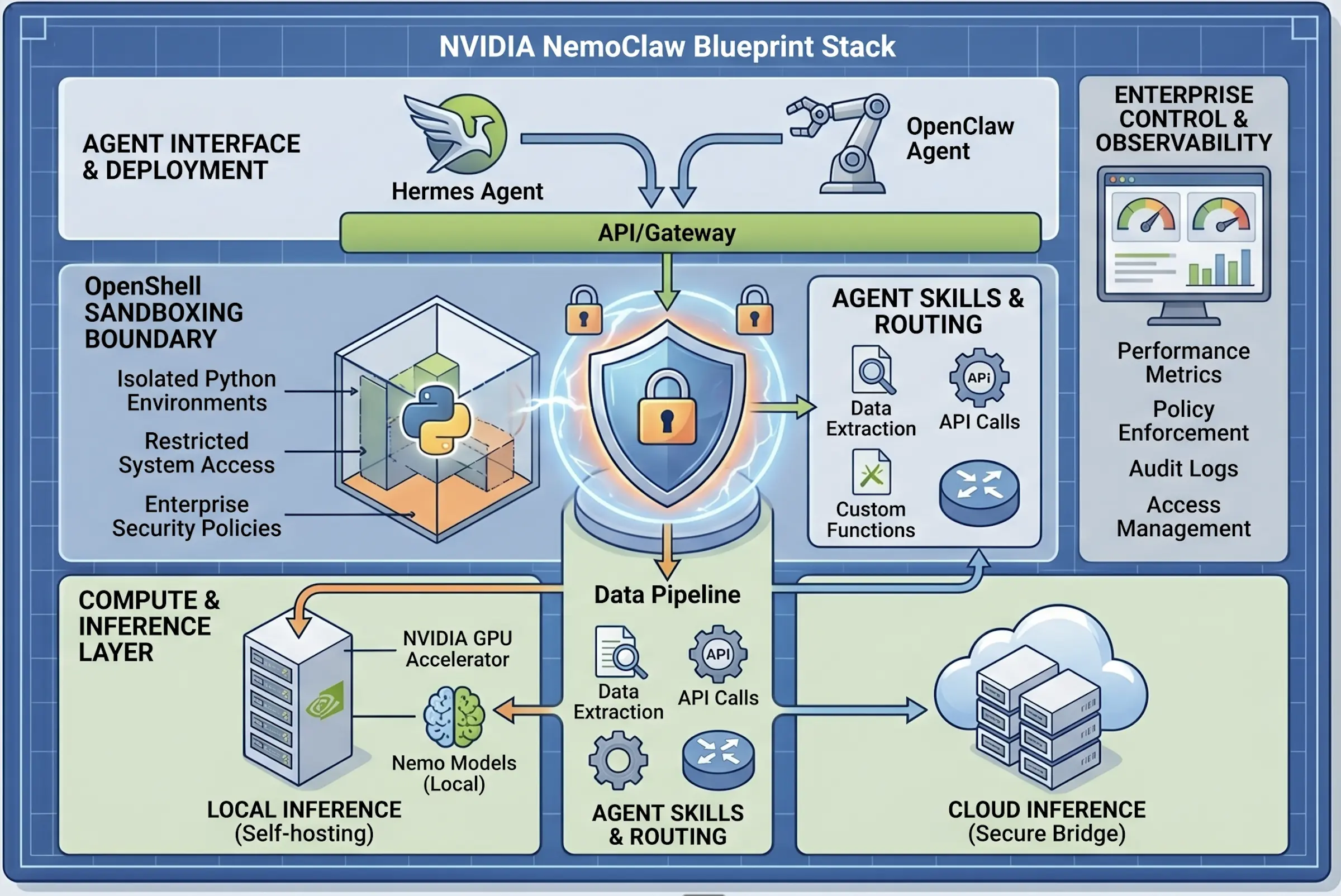
The docs describe a stack that includes:
- OpenShell sandboxes for controlled shell and tool execution.
- Lifecycle and operations controls for long-running agents.
- Model routing and local inference rather than hard-wiring one provider.
- User skills for packaged agent capabilities.
- OpenClaw and Hermes guides for different orchestration styles.
- Metrics and observability hooks so operators can inspect what the agent did.
This is not the same thing as “install a chatbot.” NemoClaw is closer to a reference architecture for an agent operations plane. It assumes agents will touch real systems and therefore need runtime boundaries, explicit routes, and operational visibility.
How NemoClaw Relates To Nemotron
The name is easy to confuse with Nemotron, but the layers are different.
Nemotron is NVIDIA’s model family. In our Nemotron explainer, we covered Llama Nemotron, Nemotron 3, self-hosting, model sizes, and gateway routing. Nemotron is the thing that reasons or generates text.
NemoClaw is the stack around the agent that may call a Nemotron model.
NVIDIA’s technical blog on running NemoClaw on DGX Spark shows this relationship clearly: the example uses local inference with Nemotron 3 Super as part of a NemoClaw deployment, but the agent stack also includes OpenShell isolation, messaging workflows, and approval controls. The model is one component. The runtime is the bigger story.
That separation matters in a gateway architecture:
- The model route decides whether a task goes to Nemotron, Claude, GPT, Gemini, GLM, or another model.
- The agent orchestrator decides how the agent plans, sequences, and coordinates work.
- The execution surface decides what tools the agent can touch.
- The governance layer decides what is logged, approved, blocked, or escalated.
NemoClaw mostly lives in the second and third layers, with hooks into model routing and governance.
How NemoClaw Relates To OpenClaw And Hermes
OpenClaw and Hermes are the two orchestration paths NVIDIA highlights in the NemoClaw material.
We covered the conceptual difference in Hermes vs OpenClaw: Hermes leans toward structured orchestration and operational control; OpenClaw leans toward composable execution and flexible integration.
NemoClaw wraps those paths with a practical runtime stack.
| Layer | OpenClaw path | Hermes path | NemoClaw role |
|---|---|---|---|
| Orchestration style | Composable, extensible, integration-friendly | Structured, operationally controlled | Provides blueprints around both styles |
| Execution boundary | Tools and shell surfaces need sandboxing | Runtime actions need policy and state control | OpenShell and runtime controls contain execution |
| Model access | Can call local or remote models | Can call local or remote models | Routes model calls through the configured stack |
| Skills | Reusable agent capabilities | Reusable agent capabilities | Supports user skills as packaged behavior |
| Operations | Needs metrics, lifecycle, and logs | Needs metrics, lifecycle, and logs | Adds observability and agent operations surface |
This is why NemoClaw should not be framed as “OpenClaw renamed.” It is a broader stack that can run with OpenClaw or Hermes-style agents.
What Is OpenShell?
OpenShell is one of the most important pieces in the NemoClaw story because shell access is where agent demos become risky.
An agent that can run commands can also:
- Read files it should not read.
- Write files in the wrong place.
- Leak secrets through logs.
- Execute destructive commands.
- Pull unsafe packages.
- Create network calls outside an approved boundary.
NemoClaw’s documentation and examples put OpenShell at the execution boundary. The practical idea is straightforward: if an agent needs a shell, give it a controlled shell with policies, isolation, and auditability rather than a raw terminal.
That is the difference between “the agent can run a command” and “the agent can run an approved command inside a monitored boundary.”
For enterprises, this is the part to evaluate first. Model quality is only useful if the agent cannot damage the environment while using that quality.
Delivery Model: SaaS, Self-Hosted, Or Library?
Based on NVIDIA’s current public material, NemoClaw is best understood as an open blueprint/reference stack, not as a single SaaS product.
The delivery model looks like this:
- Documentation and blueprints explain the stack and use cases.
- Build entries expose NemoClaw-for-OpenClaw and NemoClaw-for-Hermes starting points.
- Install commands and open-source components give teams a path to run locally or in their own infrastructure.
- DGX Spark and NVIDIA infrastructure examples show how NVIDIA expects teams to pair the stack with local accelerated inference and controlled operations.
That makes NemoClaw most relevant for platform teams, AI infrastructure teams, and engineering organizations comfortable operating their own agent stack. It is less relevant for a team that only wants a hosted productivity tool with no runtime ownership.
The trade-off is familiar: more control, more responsibility.
NemoClaw vs Adjacent Layers
NemoClaw is easiest to understand when it is separated from the pieces people often compare it with.
| Thing | What it is | What it does not replace |
|---|---|---|
| Nemotron | NVIDIA’s model family for reasoning, chat, coding, RAG, and agentic tasks | Agent lifecycle, shell isolation, approvals, workflow state |
| OpenClaw | A composable agent orchestration path | Enterprise-wide audit, cost attribution, cross-runtime governance |
| Hermes | A more structured orchestration path | Model portfolio management or organization-level policy |
| OpenShell | A controlled execution surface for shell/tool work | Model reasoning or task planning |
| NemoClaw | The reference stack/blueprint that connects orchestration, execution, routing, skills, and operations | A complete enterprise control plane by itself |
This distinction prevents two common mistakes.
The first mistake is treating NemoClaw as if it were only a model-serving layer. It is not. Model routing is part of the stack, but the hard problem is controlled execution: what the agent can do after the model decides on an action.
The second mistake is treating NemoClaw as if it eliminates the need for enterprise governance. It does not. It can make one runtime more inspectable and more contained, but it does not automatically solve cross-team approval workflows, portfolio-wide model policy, spend attribution, compliance evidence, or release governance across every AI tool in the company.
That is why NemoClaw is useful but not sufficient. It can be a strong runtime inside a larger architecture. It should not become an unmanaged exception to that architecture.
Governance Questions NemoClaw Raises
NemoClaw’s value is that it makes powerful agents more operable. The same power means governance has to be explicit from the start.
An enterprise team should decide:
- Which users can create or modify skills?
- Which skills can call OpenShell?
- Which tools are read-only, write-capable, or approval-gated?
- Which model routes are allowed for sensitive data?
- Which local models are approved for regulated workloads?
- Which agent actions are logged as compliance evidence?
- Which workflows require human approval before a command executes?
- Which outputs are allowed to become code, tickets, messages, or deployments?
These are not paperwork questions. They determine whether an always-on agent is a controlled system or a hidden operations risk.
The safest design is to start with narrow permissions and promote routes deliberately. A NemoClaw agent that can summarize logs is a different risk class from a NemoClaw agent that can patch files, open tickets, restart services, or message customers. The architecture should treat those as separate capabilities with separate approval rules.
Workloads NemoClaw Targets
NemoClaw is most useful when the agent needs to keep running, use tools, and operate near systems that matter.
Good candidate workloads:
- Developer and DevOps assistants that inspect repos, run commands, summarize build failures, or propose fixes.
- IT operations agents that triage alerts, fetch telemetry, call approved runbooks, and draft remediation steps.
- Workflow automation agents that need state, skills, and approvals across many steps.
- Enterprise RAG agents that combine local/private retrieval with model routing.
- Internal copilots that need controlled access to shell, files, tickets, and messaging tools.
- GPU-local agent experiments where a team wants to pair local Nemotron inference with a controlled agent runtime.
Poor candidate workloads:
- A simple content-generation chatbot.
- One-off prototype agents that do not touch real systems.
- Workloads where the team cannot operate the stack.
- Tasks where a hosted closed-model assistant is already sufficient and policy risk is low.
- Highly regulated production automation without an external governance/audit layer.
NemoClaw is infrastructure for serious agents. That is the value and the cost.
Pick NemoClaw When
Choose NemoClaw when most of the following are true:
- You want an open, inspectable agent runtime stack rather than a black-box hosted agent.
- You are already invested in NVIDIA infrastructure or expect to run local inference.
- Your agents need a controlled shell or tool execution environment.
- You want to experiment with OpenClaw or Hermes without inventing every operational pattern yourself.
- Your workloads need state, lifecycle management, skills, and observability.
- You can maintain model routes, policy boundaries, and runtime upgrades.
Do not choose NemoClaw just because it is new. Choose it because the operating model matches your team.
If your main problem is “which model should answer this prompt?” start with model evaluation and an LLM gateway. If your main problem is “how do we let agents safely operate tools over time?” NemoClaw becomes much more relevant.
Where Axiom Fits
NemoClaw is about running an agent stack. Axiom is about governing AI execution across teams, tools, models, and delivery workflows.
Those are complementary layers.
In an enterprise architecture, NemoClaw could sit as one controlled agent runtime behind a broader governance plane. The Unified AI Gateway can normalize routing, audit, approvals, costs, and traces across multiple runtimes: NemoClaw agents, VibeFlow agents, custom internal agents, IDE assistants, and direct application calls.
The pattern looks like this:
- NemoClaw controls how one class of agents runs.
- The LLM Gateway controls which model route each call uses.
- The governance layer records who initiated the work, what tools were used, what model answered, what artifacts changed, and which approvals were required.
- Delivery workflows decide whether agent output can become a branch, pull request, deployment, or production change.
That matters because a mature enterprise will not standardize on one agent runtime forever. It will have many. The control plane should outlive any single runtime choice.
What To Verify Before Production
Before standardizing on NemoClaw, verify the details that demos rarely settle:
- Which OpenClaw or Hermes blueprint is being used?
- Which model routes are configured?
- Are local Nemotron routes pinned to exact checkpoints?
- What can OpenShell read, write, and execute?
- How are secrets mounted or withheld?
- Where do logs, traces, and command histories go?
- Which actions require human approval?
- How are user skills reviewed and versioned?
- What happens when the model produces invalid tool arguments?
- How are runtime upgrades tested?
- How does the stack integrate with your existing security monitoring?
The answer should be written down before the first production agent is granted real privileges.
The Practical Take
NemoClaw is NVIDIA’s blueprint for a controlled agent runtime stack. It is not a replacement for Nemotron, OpenClaw, Hermes, or an enterprise governance platform. It is the connective tissue that helps those pieces operate together: local or routed models, reusable skills, controlled shell execution, lifecycle operations, and observability.
That makes it interesting for teams building serious internal agents on NVIDIA infrastructure. It is especially relevant when agents need to operate tools, maintain state, and run near sensitive systems.
The right adoption path is measured:
- Evaluate NemoClaw with a narrow internal workflow.
- Keep tool permissions small.
- Route model calls through a gateway.
- Record every action.
- Add human approvals before write operations.
- Promote only after the evals and audit trail are boring.
That is the enterprise pattern. Models get the attention, but runtimes decide whether agents can be trusted.
Written by
AXIOM Team